Red Panda Enrichment Device
CLASS: nm3231 physical interaction design
DATES: january TO april 2018
LOCATION: national university of singapore, singapore
MY ROLE: VIDEO PRODUCTION LEAD, background research, product design
mY TEAM: “team red panda” FEAT. DANIEL CHAN, jasmine chong, deanne galicia, Emmelyn Koh, vanessa kwa, kendrick tay, aw mei yu
MY TUTOR: dr andrew quitmeyer
Introduction
In collaboration with the Singapore Zoo (Wildlife Reserves Singapore), we were tasked with developing animal enrichment devices for use with living animals at the Singapore Zoo. The Zoo assigned our class four different animals with special needs that pose unique design challenges in terms of its unique senses, habitat, and interactive abilities. At the end of the semester, we presented our projects to our collaborators at the Zoo, who installed them for long-term use.
Topic: Animal Computer Interaction and Zoo Enrichment
At the beginning of the semester, we were given a list of animals to choose from, and groups were formed from this. Being part of the House of Ponya at Tembusu College, I thought it would be a great opportunity to choose the red panda (another name for Ponya) to design these enrichment devices for as I would be able to learn more about my house’s animal in the process.
Design Process
User Research
Designing for animals was a first for myself, as all my previous design projects dealt with designing for people. I approached this project as a fun challenge and I had to make some slight adjustments to how I approached the design process due to this.

Step 1 - Background Research
Since I knew very little about the red panda, I spent a substantial amount of time researching on the red panda - their size, sounds they made, diet, predators, location - as we were designing enrichment devices for them, and after a short discussion with my group, presented to our class our findings.

Step 2 - Initial Concepts
From our background research, we came up with two initial concepts - Panda Bishi Bashi, and Food Carrousel

Step 3 - Observation
We made multiple visits to the Singapore Zoo as a group to visit the red panda exhibit and watched them move around and be fed in the enclosure. We made notes of this and also took note of the enclosure itself, and the layout of the exhibit.

Step 4. Interview
Obviously we couldn’t interview the ‘user’ - the red pandas,’ so we had to ask the people who knew them best, the zookeepers. We had a list of questions to ask the zookeeper of the red pandas, Dr Dre, and received great responses.
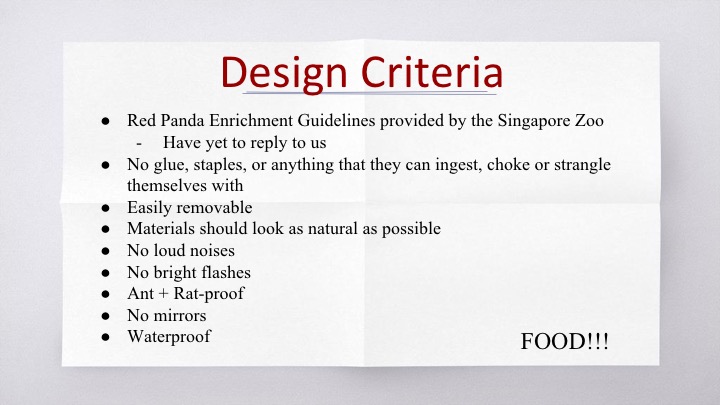
After this research phase, we, as a team, came up with a list of design criteria and new ideas.


Our workspace at the National University of Singapore. We put up a large piece of paper on the wall to brainstorm our ideas.
Final Concept Development
As it would be the zookeeper who would be using the enrichment device with the red pandas, and who knew the animals the best, we presented our four ideas to him. He agreed the most feasible idea would be the first idea - making an auto-feeder and placing it in/on an artificial log in the enclosure. This is what we started working on further.
The final concept entails of three components:
Gameplay: Mini Bishi-Bashi
Food Dispenser
Food Launcher
Low-Fidelity Prototype
Gameplay: Mini Bishi-Bashi - we made use of an ADC touch sensor, three plastic balls cut in half wrapped in aluminium with three lights
Food Dispenser - cardboard cut outs to make the shape of a cylinder with six slices, Arduino, ultrasonic sensor
Food Launcher - thick stick for the catapult, pieces of thin wood, gearbox, Arduino


As we couldn’t visit and test the red pandas in the Singapore Zoo whenever we wanted, we had to do user testing with our classmates and tutor and get feedback from them. We had to simulate the red panda exhibit and walk our user through certain tasks we wanted them to achieve. Despite having to conduct our user testing this way, we still managed to get some helpful suggestions and questions we were left with before we moved on to our hi-fi prototype.

Some questions we asked ourselves after performing user testing with our low-fidelity version of our concept included:
Will the red panda be receptive to light?
Will the red panda be afraid of their ‘flying’ snack?
How to maintain freshness of fruits in the food dispenser?
Will the fruits hit the red pandas?
How to remove the food dispenser for cleaning?
We couldn’t design something that looked fake - it needed to be as naturalistic as possible, no bright lights, no loud sounds.

This is how we envisioned our food dispenser and food launcher would work together at the end.

We decided to change the stepper motor from our lo-fi prototype to a Gearbox in the hi-fi prototype.
High-Fidelity Prototype
With our problems solved, we went ahead and built a better, more versatile and weatherproof version of our lo-fi prototype. We worked on the hi-fi prototype in smaller groups in our team. I worked on the Mini Bishi-Bashi and Food Dispenser.
Gameplay: Mini Bishi-Bashi - capacitive touch rocks made using cement powder
Food Dispenser - used a PVC tube and made a 3D model of the interior of the dispenser using 1mm acrylic board
Food Launcher - made the catapult stronger, made a wooden casing for the catapult and all the wiring, replaced the stepper motor with a gearbox
We made the hi-fi prototype with the following materials:
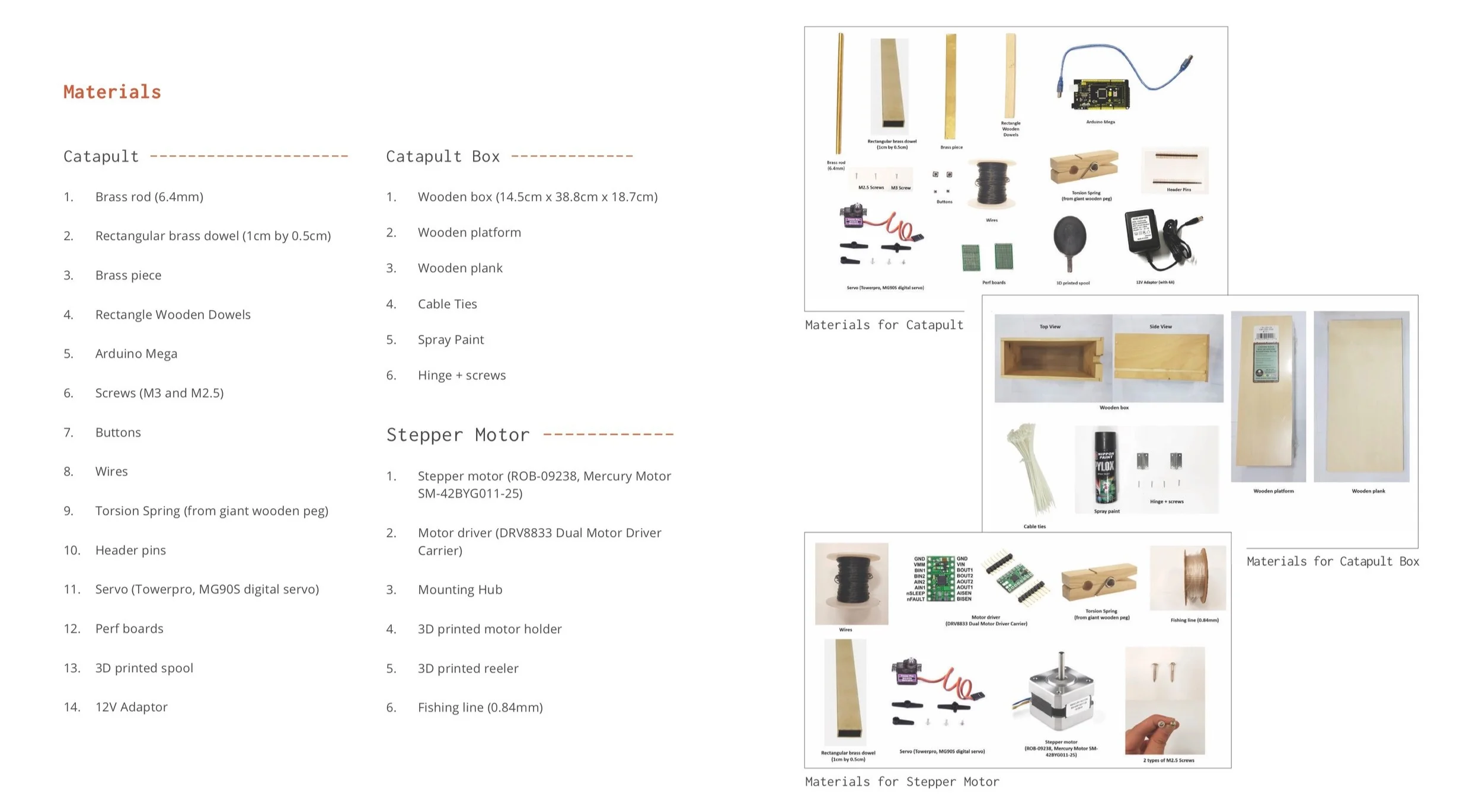
Material list for Food Launcher

Material list for Gameplay cement rock moulds

Material list for Food Dispenser
1. My role on the Mini Bishi-Bashi
I worked on soldering the led bulbs, piezo buzzer and wires to the board for the rocks, ensuring that they were connected and wired properly and panda-proof.
I also worked on filing down the plastic acrylic parts on the rocks so that they wouldn’t be too dangerous for the red pandas when they touch the rocks.
Threading the wires through a plastic tube to weather-proof the wires.

Soldering the led bulbs, buzzer and wires to the boards

Filing down the plastic acrylic parts on the rocks

Threading wires through the plastic tube that connects the rocks to the Food Launcher
2. My role on the Food Dispenser
I worked on supergluing the acrylic parts together and connecting it to the PVC tube to form the food dispenser structure. I faced some difficulties connecting the acrylic parts to the tube as the tube wasn’t exactly circular, so I had to experiment by cutting parts of the interior walls so that the rotating mechanism would work as we wanted it to.

We used Adobe Illustrator to sketch out the parts of our Food Dispenser to be laser cut, and used Rhino to make a 3D model of our Food Dispenser.


Initially we superglued the acrylic base of the dispenser to the bottom of the PVC tube (see left photo) but after testing it with the interior walls, the food didn’t dispense properly. In order to solve this we moved the acrylic base to inside the tube (as in the right photo).


We made a wooden structure to hold the food dispenser.
3. Making the Food Catapult
Refining the code for the food catapult:

Final touches on the catapult:

Videos testing our final concept robot’s launch angle and distance with the red panda and zookeeper:
We made a mini remote on the side of the Food Catapult for Different Modes (including a troubleshooting mode):
Automatic Mode - Press the button on the control pad labelled “Auto”. One of the rocks should light up and beep. After the rocks have been pressed
3 times, the catapult will start reeling automatically. Keeper will load food onto the catapult spool immediately and catapult will launch automatically. The whole cycle will start again.Manual Mode - Press the button on the control pad labelled “Manual”. One of the rocks should light up and beep. After the rocks have been pressed 3 times, the catapult will start reeling automatically. Keeper will load food onto the catapult spool. After loading, keeper will press the buttonlabelled “Launch” to fling the food into enclosure.The whole cycle will start again.
Manual Without Rocks Mode - Press the button on the control pad labelled “ManualWR”. The catapult will start reeling automatically. Keeper will load food onto the catapult spool. After loading, keeper will pressthe button labelled “Launch” to fling the food intoenclosure. The whole cycle will start again.
Debug Mode (For troubleshooting)
Press the button on the control pad labelled “Debug”. To test out the functionality of each component, press the buttons one by one. Components that can be tested are labelled “Rock A”, “Rock B”, “Rock C”, “Launch” and “Reel”. This mode is to allow keepers to troubleshoot the system should any problems arise. The rocks A, B and C should beep and light up, while both “Launch” and “Reel” components should turn.

Here is a video of our Food Catapult working:
After our final user testing our enrichment device with the red pandas at the zoo, we came to realise:
Food Launcher + Interactive Rock Sensors System:
Catapult idea was not feasible: apple slices could not be eaten off the ground —> however, zookeeper noted that it could be useful for primates or giant pandas instead
Touch sensitive rocks did not attract the red panda —> however, zookeeper noted that it could be useful for primates
So this ruled out the Food Launcher however we kept working on it as the zookeeper said it could be used for other agile animals instead such as the primates and serval cats. These quick-witted animals would be more suited for the challenging nature of the rocks, as they would have to figure out the randomised patterns to tap on the rocks.
Food Dispensor + Ultrasonic Sensor System
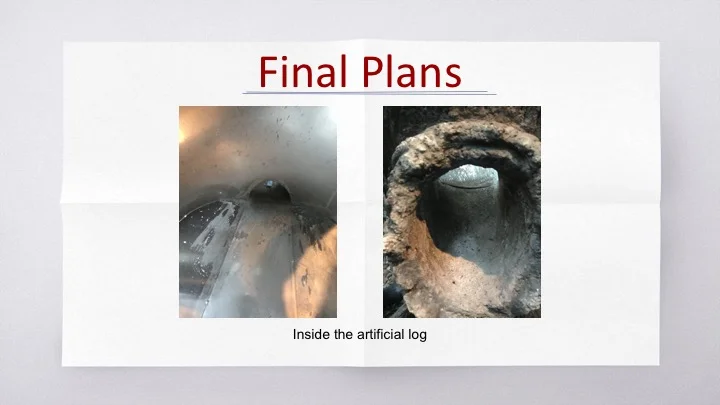
Zookeepers believed the idea could work and be implemented in the enclosure - be placed in an artificial trunk within the enclosure
See photos below for sketches of where this system would go in the trunk

Our Solution
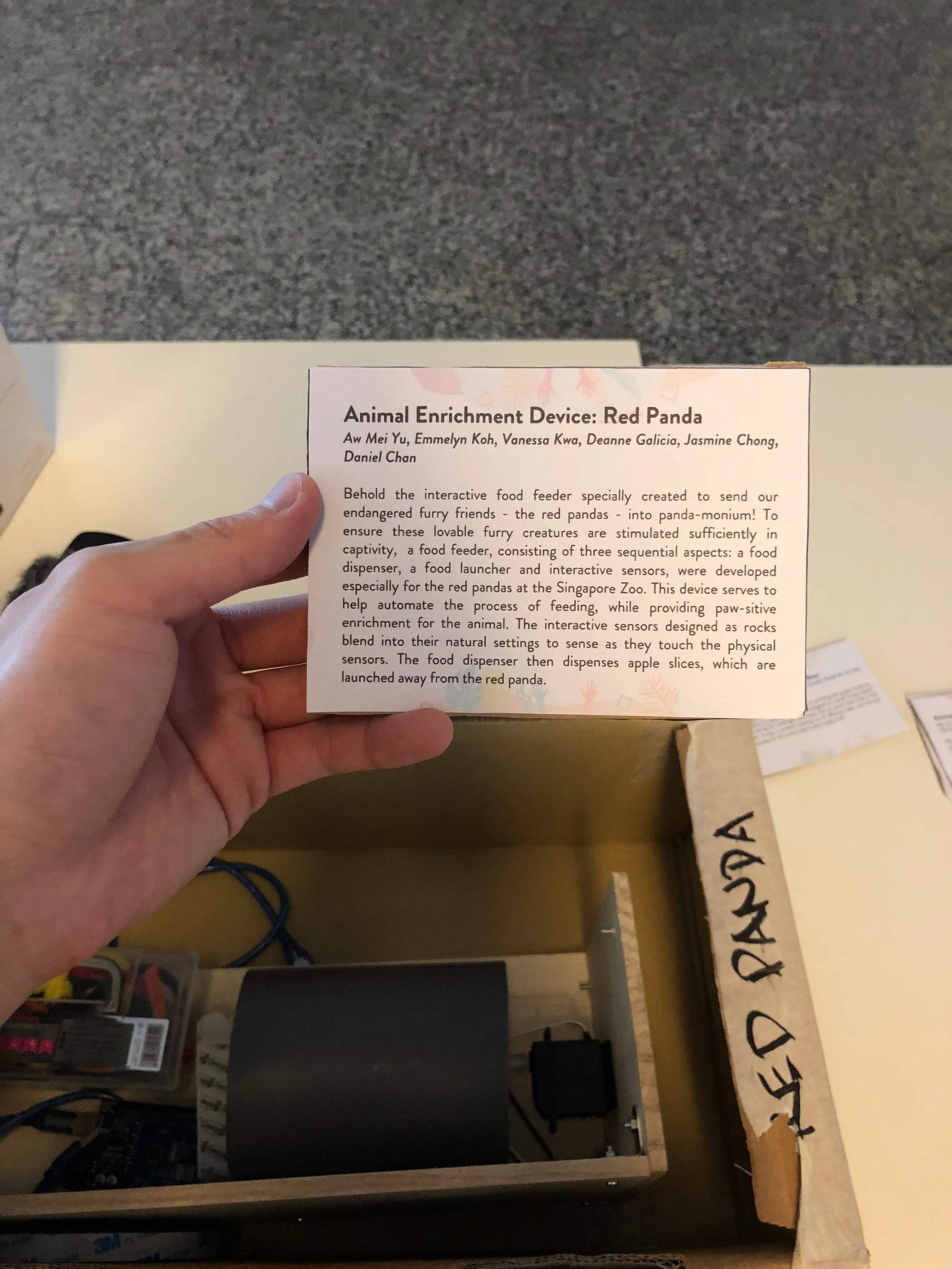
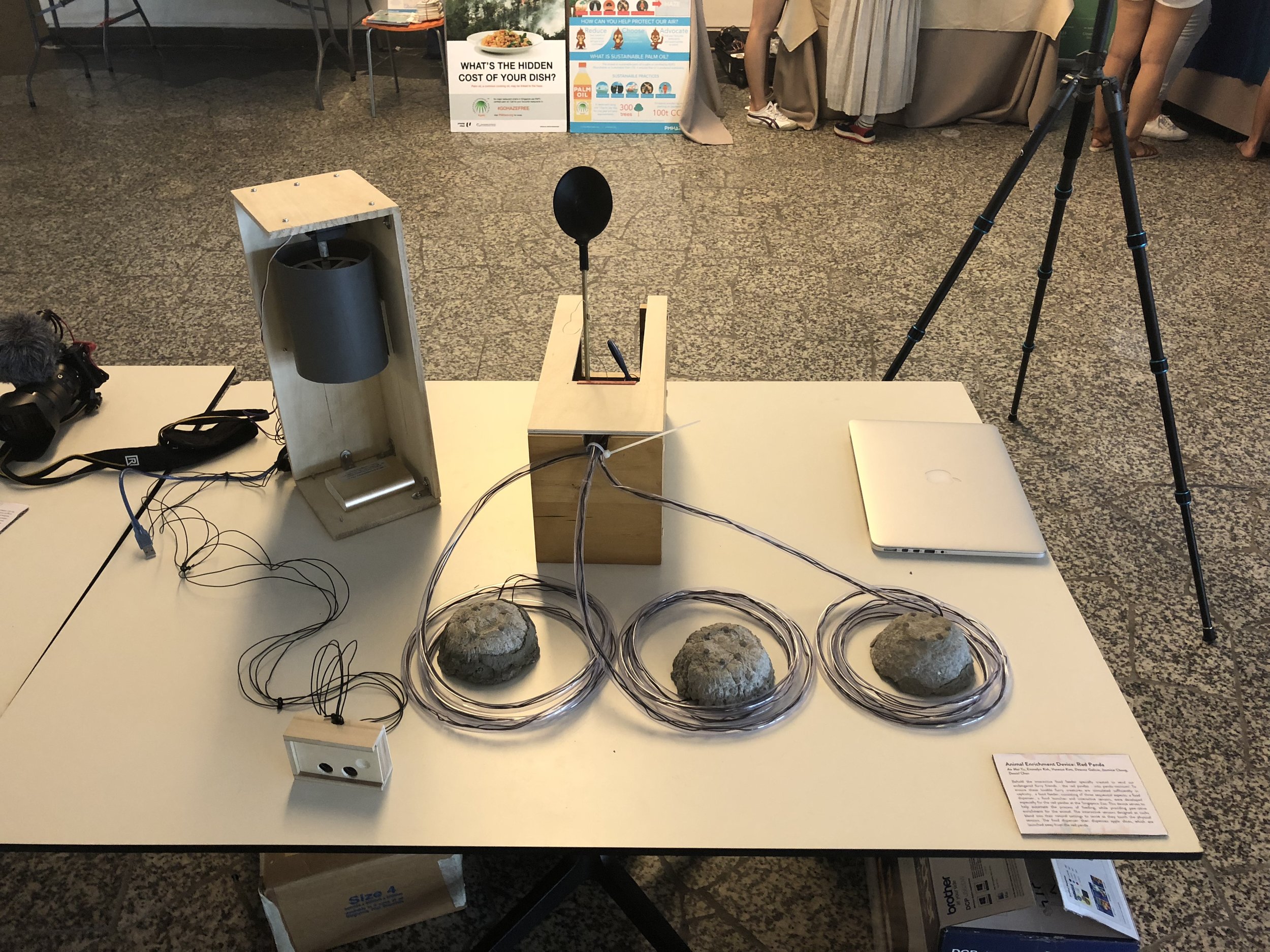
The Red Panda Feeding System
The interactive food feeder is an innovative automated feeding device specially created in collaboration with the Singapore Zoo to send our endangered furry friends - the red pandas into pandamonium. To ensure these loveable furry creates are enriched effectively in captivity, we came up with two interactive food feeder systems in which each system is made up of two sequential parts.
The first system consists of a food launcher and interactive rock sensors
The second system consists of a food dispenser and ultrasonic sensors
These two systems will help zookeepers by automating the process of feeding.

Food Launcher + Interactive Rock Sensors System

Food Dispensor + Ultrasonic Sensor System
Video
Red Panda Enrichment Device Manual

We wrote a documentation manual on our enrichment system for the zookeepers, which outlines: instructions for using it, materials needed to make it, step-by-step on how we made it, links to the code, sustainability issues, and future improvements.
Reflection

The team behind the Interactive Food Feeder for the Red Pandas at the Singapore Zoo.
Left to Right: Deanne Galicia, Daniel Chan, Vanessa Kwa, Zoo Keepers, Emmelyn Koh, Jasmine Chong, Aw Mei Yu
The semester’s semester long project was to design an enrichment device for a specific animal at the Singapore Zoo. At home, I never had the chance to design for an animal before so this module surely made me excited for each week to come, and learning a small useful tech concept to help us with our semester team group project was cool! My team’s animal was the red panda - cute furry endangered creatures. My team, Team Red Panda #TeamRP, consisted of Vanessa, Emmelyn, Aw Mei Yu, Deanne, and Kendrick. One of the reasons I wanted to design for this animal was because my House at my college, Tembusu College, is Ponya House, where the mascot is a red panda, so I also thought wouldn’t it be awesome if I could design for the animal as I thought it’d be cool to learn about the animal as well! I still remember in one of the first lectures, Prof Andy announced that we were going to make three field trips to the Singapore Zoo over the semester to see and learn more about our animal, the exhibit space and hear from the animal’s zoo keepers. The first field trip to the zoo took place in week 4. Here we met the zookeeper, Dr Andre (Dr Dre) and from that first trip, we learnt a lot - from the first few sentences he said, I realized of constraints immediately. Dr Dre spoke so softly, he was whispering to us. I really hoped he spoke louder so I could pick up on video and the external mic our initial conversation with him for our video we’d make later on in the semester for our final deliverables, but oh well. We learnt about the red pandas in the exhibit - there were two, Pushka and Karma, but only one was in the exhibit at a time, they both had different personalities, ate thinly sliced apple slices mostly. Some initial impressions of the exhibit included - the red pandas were in a closed air conditioned controlled room - it was really cold inside, so the red pandas must prefer cooler temperatures or something? I also noticed that there were two parts of the red panda exhibit and they were connected via a branch, however during my time there the first visit, the red panda rarely crossed it...why? The red pandas were also in the same room as the giant panda. After some research on red pandas and trying to find out more about past red panda enrichment online (in which we basically found none of) we brainstormed some initial ideas. They included - rock climbing wall for the panda to climb up, with lit up rocks that the panda would have to touch to get the food, Bishi Bashi game, and food carrousel among others.
After some early prototyping, before we knew it, it was week 9, and we made our second zoo visit. Here we learnt more about the constraints on red pandas. We couldn’t design something that looked fake - it needed to be as naturalistic as possible, no bright lights, no loud sounds. It basically got us back to the drawing board, but luckily our initial prototype consisted of three parts.......and one of them, Dr Dre thought would work well for the exhibit - the food dispenser. But over the next few weeks we still worked on and developed all three parts. Our team, broadly speaking did not have much arduino experience, and thus we had to ask for help from Prof, TA numerous times. We also were thankful for Alec (from Team Chameleon) for countlessly helping us with the code when we encountered problems. Despite receiving much needed help with the arduino side of things, I’m positive that we learnt more about arduinos over the course of the semester.
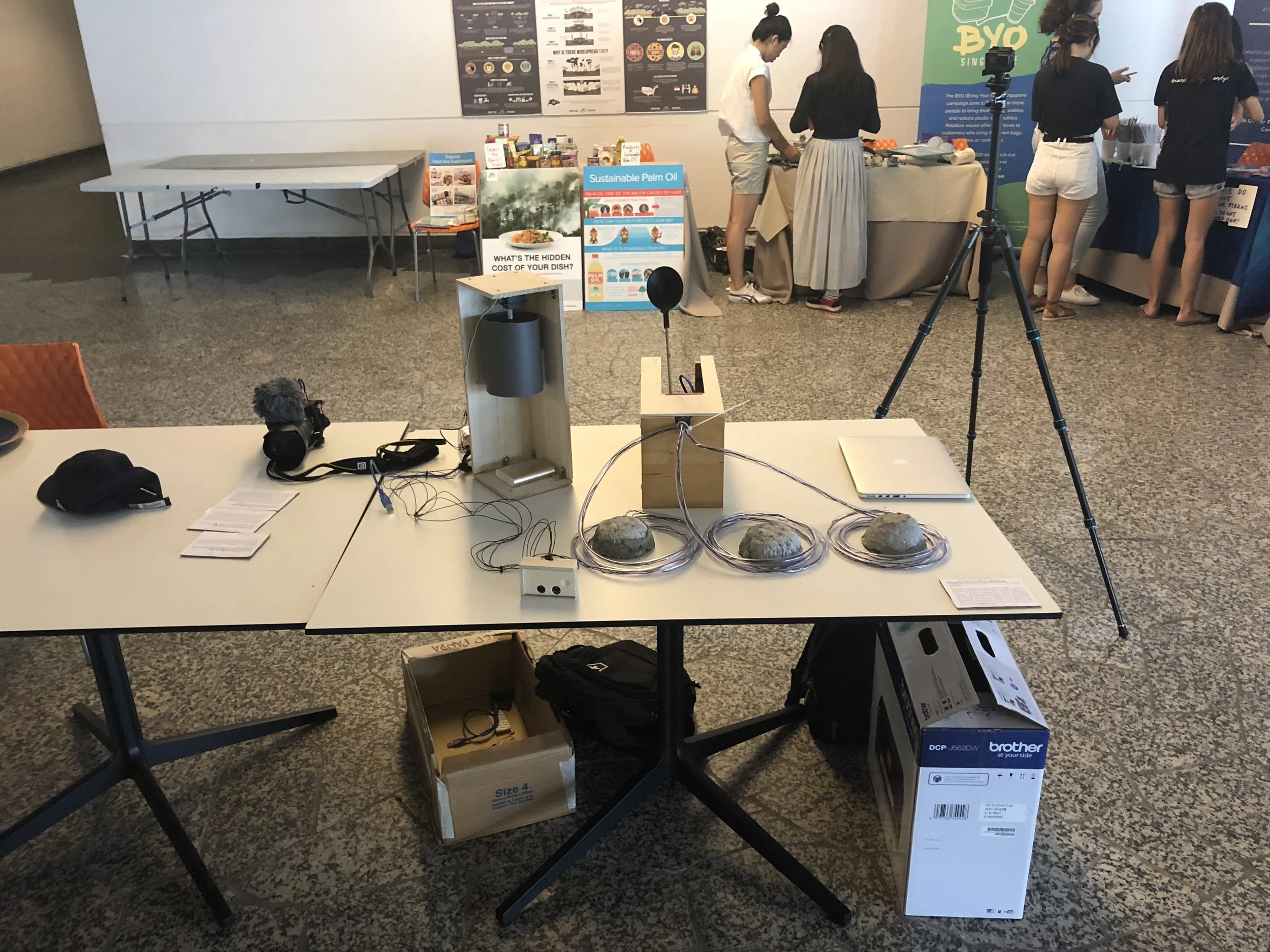
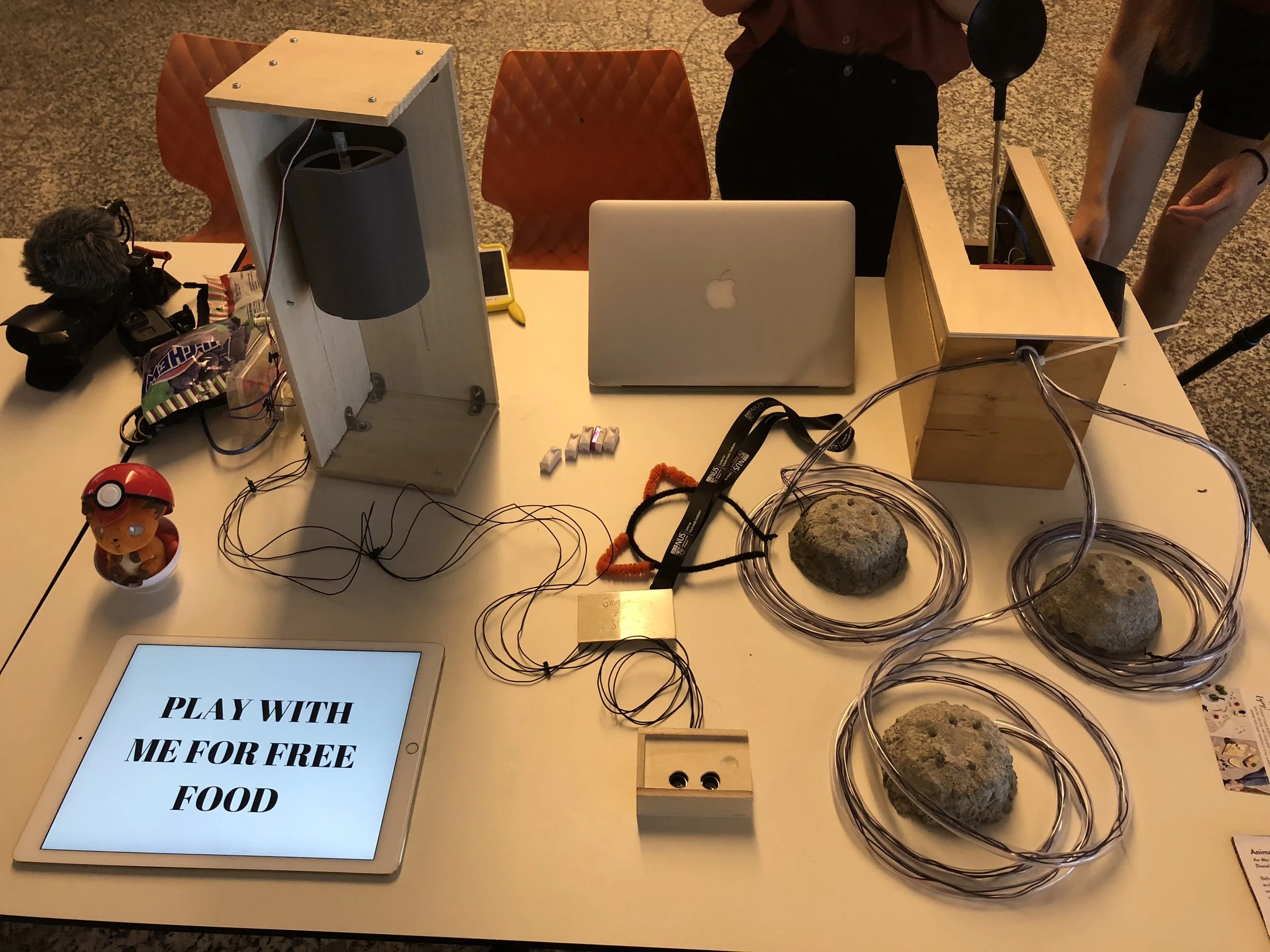
One of the highlights of the semester was displaying our prototype at Random Blends during week 11, and having members of the public walk by talking to us about our work and wanting to test it out. We received interesting and helpful feedback here, and even had the outgoing and incoming CNM head stop by our stall. The prototypes still had work to do but having the chance to do user testing and present our prototypes to the public in a two day event such as this was marvellous indeed.
The weeks leading up to the final presentation, was a time when we’d needed to visit the zoo and test out the prototypes with the red panda, however, we were unable to due to the red pandas being unwell according to our zookeeper. This made it very hard for us to test our prototype, however, we did user testing amongst ourselves in class. Long days, late nights, and Team Red Panda kept hustling through the final weeks before the final presentation. Soldering the wires onto the boards and making sure the prototype was panda-proof took some time, the soldering kept breaking and interfering with the other wires. I learnt numerous things about soldering in these past weeks especially.
For the final presentation, I was in charge of making the video for the documentation part. We wanted to make the video have as much Kickstarter vibes as possible - and we wanted to make sure we conveyed why we made the prototype and how it works in around 3 minutes. The original script we co-wrote was over 6 minutes, and had to cut it down since the presentation time limit per group was 8 minutes. It wasn’t too hard cutting it down as we also wanted to speak in the presentation as well about the prototype, not just everything in the video! Deanne and I did the voiceovers for the video, and put clips I took of our design process from the course of the semester into the video as montage-like transitions. The final video was less than 4 minutes, and in my opinion, conveyed what we needed to pretty well. I really wanted to have everyone in Team Red Panda speak a part in the video, but this was not possible as not everyone could be in during filming.
When the final presentation day came around, we were feeling good. We had assembled everything and brought both our two prototypes to show off to the zookeepers at the Singapore Zoo. The presentation went pretty smoothly, we each had a few slides each to talk about our design and had people come to us afterwards to try out themselves the food catapult and food dispenser. After presenting, we headed to the red panda exhibit and actually, FINALLY got a chance to test out our food dispenser prototype with the red panda! It was here when we realised that the apple slices were too thin to work with our dispenser, but the zookeepers liked our prototype and decided to keep it to use. We left the suggestion that they could cut the apple slices a little bit thicker to ensure the slices dispense properly. We observed that the red panda came across to the other side of the exhibit multiple times (which was unusual), and played around with the ultrasonic sensor but never actually activated the food dispenser to drop the apple slices. I am certain however, that with more practice and exposure to the prototype, the red panda will realise this in no time and be more keen to be more curious and explore other parts of the exhibit.

Presenting our red panda enrichment device to the Singapore Zoo zookeepers.
Some future extensions we would make to the food dispenser would be to further panda-proof our prototype, by using stronger materials. We would also make more rocks with sensors for the exhibit to encourage greater movement amongst the red pandas and perhaps if the zoo put more artificial logs in the exhibit, we could have more food dispensers in different parts of the exhibit, instead of just having one in one part of the exhibit, so the panda would not have to go to just one part to get food. This would automate the feeding for the red panda even more and allow the zookeepers to focus on other aspects of the red pandas’ needs. Hopefully, the zoo would be able to read through our design manual and make more food dispensers to make this a reality!
All in all, from a first for designing for animals to further honing how to program using arduinos, from becoming more proficient at soldering to being an exchange student working with locals, this module has far exceeded my expectations. Thanks so much for the unbelievable and memorable semester, Prof Andy and TA Kendrick!
Exhibited at Random Blends 2018
Our project, along the other groups’ animal enrichment devices were exhibited at Random Blends 2018. It was a two day event, from 9-8pm both days, and here my group and I showed off our enrichment devices to the general public and fellow students of the National University of Singapore. Although we couldn’t have our endangered animals from the Singapore Zoo there in person, I personally loved seeing the faces of people both young and old light up in excitement when the interaction worked, especially when the catapult flung items into the distance!